* Fix mouse states and priority order of operation * Add metadata for tampered transform * Add comments explaining details * Improve comments * Move out of bounds checks into rotate check --------- Co-authored-by: Keavon Chambers <keavon@keavon.com>
This commit is contained in:
parent
90a8036c47
commit
38e542e6c0
|
|
@ -33,14 +33,22 @@ pub struct SelectedEdges {
|
||||||
aspect_ratio: f64,
|
aspect_ratio: f64,
|
||||||
}
|
}
|
||||||
|
|
||||||
|
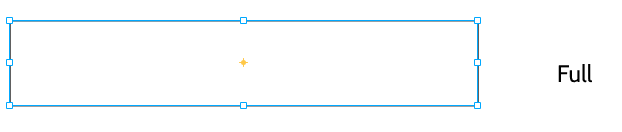
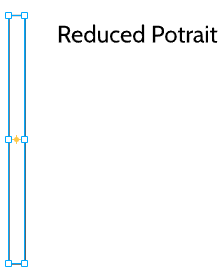
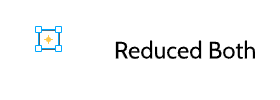
/// The different possible configurations for how the transform cage is presently viewed, depending on its per-axis sizes and the level of zoom.
|
||||||
|
/// See doc comments in each variant for a diagram of the configuration.
|
||||||
#[derive(Clone, Debug, Default, PartialEq)]
|
#[derive(Clone, Debug, Default, PartialEq)]
|
||||||
enum HandleDisplayCategory {
|
enum TransformCageSizeCategory {
|
||||||
#[default]
|
#[default]
|
||||||
|
/// - 
|
||||||
Full,
|
Full,
|
||||||
|
/// - 
|
||||||
ReducedLandscape,
|
ReducedLandscape,
|
||||||
|
/// - 
|
||||||
ReducedPortrait,
|
ReducedPortrait,
|
||||||
|
/// - 
|
||||||
ReducedBoth,
|
ReducedBoth,
|
||||||
|
/// - 
|
||||||
Narrow,
|
Narrow,
|
||||||
|
/// - 
|
||||||
Flat,
|
Flat,
|
||||||
}
|
}
|
||||||
|
|
||||||
|
|
@ -344,6 +352,7 @@ pub fn snap_drag(start: DVec2, current: DVec2, axis_align: bool, snap_data: Snap
|
||||||
pub struct BoundingBoxManager {
|
pub struct BoundingBoxManager {
|
||||||
pub bounds: [DVec2; 2],
|
pub bounds: [DVec2; 2],
|
||||||
pub transform: DAffine2,
|
pub transform: DAffine2,
|
||||||
|
pub transform_tampered: bool,
|
||||||
pub original_bound_transform: DAffine2,
|
pub original_bound_transform: DAffine2,
|
||||||
pub selected_edges: Option<SelectedEdges>,
|
pub selected_edges: Option<SelectedEdges>,
|
||||||
pub original_transforms: OriginalTransforms,
|
pub original_transforms: OriginalTransforms,
|
||||||
|
|
@ -371,7 +380,7 @@ impl BoundingBoxManager {
|
||||||
/// Update the position of the bounding box and transform handles
|
/// Update the position of the bounding box and transform handles
|
||||||
pub fn render_overlays(&mut self, overlay_context: &mut OverlayContext) {
|
pub fn render_overlays(&mut self, overlay_context: &mut OverlayContext) {
|
||||||
let quad = self.transform * Quad::from_box(self.bounds);
|
let quad = self.transform * Quad::from_box(self.bounds);
|
||||||
let category = self.overlay_display_category(quad);
|
let category = self.overlay_display_category();
|
||||||
|
|
||||||
let horizontal_edges = [quad.top_right().midpoint(quad.bottom_right()), quad.bottom_left().midpoint(quad.top_left())];
|
let horizontal_edges = [quad.top_right().midpoint(quad.bottom_right()), quad.bottom_left().midpoint(quad.top_left())];
|
||||||
let vertical_edges = [quad.top_left().midpoint(quad.top_right()), quad.bottom_right().midpoint(quad.bottom_left())];
|
let vertical_edges = [quad.top_left().midpoint(quad.top_right()), quad.bottom_right().midpoint(quad.bottom_left())];
|
||||||
|
|
@ -385,34 +394,43 @@ impl BoundingBoxManager {
|
||||||
};
|
};
|
||||||
|
|
||||||
// Draw the horizontal midpoint drag handles
|
// Draw the horizontal midpoint drag handles
|
||||||
if matches!(category, HandleDisplayCategory::Full | HandleDisplayCategory::Narrow | HandleDisplayCategory::ReducedLandscape) {
|
if matches!(
|
||||||
|
category,
|
||||||
|
TransformCageSizeCategory::Full | TransformCageSizeCategory::Narrow | TransformCageSizeCategory::ReducedLandscape
|
||||||
|
) {
|
||||||
horizontal_edges.map(&mut draw_handle);
|
horizontal_edges.map(&mut draw_handle);
|
||||||
}
|
}
|
||||||
|
|
||||||
// Draw the vertical midpoint drag handles
|
// Draw the vertical midpoint drag handles
|
||||||
if matches!(category, HandleDisplayCategory::Full | HandleDisplayCategory::Narrow | HandleDisplayCategory::ReducedPortrait) {
|
if matches!(
|
||||||
|
category,
|
||||||
|
TransformCageSizeCategory::Full | TransformCageSizeCategory::Narrow | TransformCageSizeCategory::ReducedPortrait
|
||||||
|
) {
|
||||||
vertical_edges.map(&mut draw_handle);
|
vertical_edges.map(&mut draw_handle);
|
||||||
}
|
}
|
||||||
|
|
||||||
// Draw the corner drag handles
|
// Draw the corner drag handles
|
||||||
if matches!(
|
if matches!(
|
||||||
category,
|
category,
|
||||||
HandleDisplayCategory::Full | HandleDisplayCategory::ReducedBoth | HandleDisplayCategory::ReducedLandscape | HandleDisplayCategory::ReducedPortrait
|
TransformCageSizeCategory::Full | TransformCageSizeCategory::ReducedBoth | TransformCageSizeCategory::ReducedLandscape | TransformCageSizeCategory::ReducedPortrait
|
||||||
) {
|
) {
|
||||||
quad.0.map(&mut draw_handle);
|
quad.0.map(&mut draw_handle);
|
||||||
}
|
}
|
||||||
|
|
||||||
// Draw the flat line endpoint drag handles
|
// Draw the flat line endpoint drag handles
|
||||||
if category == HandleDisplayCategory::Flat {
|
if category == TransformCageSizeCategory::Flat {
|
||||||
draw_handle(self.transform.transform_point2(self.bounds[0]));
|
draw_handle(self.transform.transform_point2(self.bounds[0]));
|
||||||
draw_handle(self.transform.transform_point2(self.bounds[1]));
|
draw_handle(self.transform.transform_point2(self.bounds[1]));
|
||||||
}
|
}
|
||||||
}
|
}
|
||||||
|
|
||||||
fn overlay_display_category(&self, quad: Quad) -> HandleDisplayCategory {
|
/// Find the [`TransformCageSizeCategory`] of this bounding box based on size thresholds.
|
||||||
|
fn overlay_display_category(&self) -> TransformCageSizeCategory {
|
||||||
|
let quad = self.transform * Quad::from_box(self.bounds);
|
||||||
|
|
||||||
// Check if the area is essentially zero because either the width or height is smaller than an epsilon
|
// Check if the area is essentially zero because either the width or height is smaller than an epsilon
|
||||||
if self.is_bounds_flat() {
|
if self.is_bounds_flat() {
|
||||||
return HandleDisplayCategory::Flat;
|
return TransformCageSizeCategory::Flat;
|
||||||
}
|
}
|
||||||
|
|
||||||
let vertical_length = (quad.top_left() - quad.top_right()).length_squared();
|
let vertical_length = (quad.top_left() - quad.top_right()).length_squared();
|
||||||
|
|
@ -424,20 +442,27 @@ impl BoundingBoxManager {
|
||||||
let horizontal_edge_visible = horizontal_length > MIN_LENGTH_FOR_MIDPOINT_VISIBILITY.powi(2);
|
let horizontal_edge_visible = horizontal_length > MIN_LENGTH_FOR_MIDPOINT_VISIBILITY.powi(2);
|
||||||
|
|
||||||
return match (vertical_edge_visible, horizontal_edge_visible) {
|
return match (vertical_edge_visible, horizontal_edge_visible) {
|
||||||
(true, true) => HandleDisplayCategory::Full,
|
(true, true) => TransformCageSizeCategory::Full,
|
||||||
(true, false) => HandleDisplayCategory::ReducedPortrait,
|
(true, false) => TransformCageSizeCategory::ReducedPortrait,
|
||||||
(false, true) => HandleDisplayCategory::ReducedLandscape,
|
(false, true) => TransformCageSizeCategory::ReducedLandscape,
|
||||||
(false, false) => HandleDisplayCategory::ReducedBoth,
|
(false, false) => TransformCageSizeCategory::ReducedBoth,
|
||||||
};
|
};
|
||||||
}
|
}
|
||||||
|
|
||||||
HandleDisplayCategory::Narrow
|
TransformCageSizeCategory::Narrow
|
||||||
}
|
}
|
||||||
|
|
||||||
|
/// Determine if these bounds are flat ([`TransformCageSizeCategory::Flat`]), which means that the width and/or height is essentially zero and the bounds are a line with effectively no area. This can happen on actual lines (axis-aligned, i.e. drawn horizontally or vertically) or when an element is scaled to zero in X or Y. A flat transform cage can still be rotated by a transformation, but its local space remains flat.
|
||||||
fn is_bounds_flat(&self) -> bool {
|
fn is_bounds_flat(&self) -> bool {
|
||||||
(self.bounds[0] - self.bounds[1]).abs().cmple(DVec2::splat(1e-4)).any()
|
(self.bounds[0] - self.bounds[1]).abs().cmple(DVec2::splat(1e-4)).any()
|
||||||
}
|
}
|
||||||
|
|
||||||
|
/// Determine if the given point in viewport space falls within the bounds of `self`.
|
||||||
|
fn is_contained_in_bounds(&self, point: DVec2) -> bool {
|
||||||
|
let document_point = self.transform.inverse().transform_point2(point);
|
||||||
|
Quad::from_box(self.bounds).contains(document_point)
|
||||||
|
}
|
||||||
|
|
||||||
/// Compute the threshold in viewport space. This only works with affine transforms as it assumes lines remain parallel.
|
/// Compute the threshold in viewport space. This only works with affine transforms as it assumes lines remain parallel.
|
||||||
fn compute_viewport_threshold(&self, scalar: f64) -> [f64; 2] {
|
fn compute_viewport_threshold(&self, scalar: f64) -> [f64; 2] {
|
||||||
let inverse = self.transform.inverse();
|
let inverse = self.transform.inverse();
|
||||||
|
|
@ -476,6 +501,10 @@ impl BoundingBoxManager {
|
||||||
let height = max.y - min.y;
|
let height = max.y - min.y;
|
||||||
|
|
||||||
if width < edge_min_x || height <= edge_min_y {
|
if width < edge_min_x || height <= edge_min_y {
|
||||||
|
if self.transform_tampered {
|
||||||
|
return None;
|
||||||
|
}
|
||||||
|
|
||||||
if min.x < cursor.x && cursor.x < max.x && cursor.y < max.y && cursor.y > min.y {
|
if min.x < cursor.x && cursor.x < max.x && cursor.y < max.y && cursor.y > min.y {
|
||||||
return None;
|
return None;
|
||||||
}
|
}
|
||||||
|
|
@ -511,8 +540,11 @@ impl BoundingBoxManager {
|
||||||
|
|
||||||
/// Check if the user is rotating with the bounds
|
/// Check if the user is rotating with the bounds
|
||||||
pub fn check_rotate(&self, cursor: DVec2) -> bool {
|
pub fn check_rotate(&self, cursor: DVec2) -> bool {
|
||||||
let cursor = self.transform.inverse().transform_point2(cursor);
|
if self.is_contained_in_bounds(cursor) {
|
||||||
|
return false;
|
||||||
|
}
|
||||||
let [threshold_x, threshold_y] = self.compute_viewport_threshold(BOUNDS_ROTATE_THRESHOLD);
|
let [threshold_x, threshold_y] = self.compute_viewport_threshold(BOUNDS_ROTATE_THRESHOLD);
|
||||||
|
let cursor = self.transform.inverse().transform_point2(cursor);
|
||||||
|
|
||||||
let flat = (self.bounds[0] - self.bounds[1]).abs().cmple(DVec2::splat(1e-4)).any();
|
let flat = (self.bounds[0] - self.bounds[1]).abs().cmple(DVec2::splat(1e-4)).any();
|
||||||
let within_square_bounds = |center: &DVec2| center.x - threshold_x < cursor.x && cursor.x < center.x + threshold_x && center.y - threshold_y < cursor.y && cursor.y < center.y + threshold_y;
|
let within_square_bounds = |center: &DVec2| center.x - threshold_x < cursor.x && cursor.x < center.x + threshold_x && center.y - threshold_y < cursor.y && cursor.y < center.y + threshold_y;
|
||||||
|
|
@ -528,7 +560,7 @@ impl BoundingBoxManager {
|
||||||
let edges = self.check_selected_edges(input.mouse.position);
|
let edges = self.check_selected_edges(input.mouse.position);
|
||||||
|
|
||||||
match edges {
|
match edges {
|
||||||
Some((top, bottom, left, right)) if self.is_bounds_flat() => match (top, bottom, left, right) {
|
Some((top, bottom, left, right)) if !self.is_bounds_flat() => match (top, bottom, left, right) {
|
||||||
(true, _, false, false) | (_, true, false, false) => MouseCursorIcon::NSResize,
|
(true, _, false, false) | (_, true, false, false) => MouseCursorIcon::NSResize,
|
||||||
(false, false, true, _) | (false, false, _, true) => MouseCursorIcon::EWResize,
|
(false, false, true, _) | (false, false, _, true) => MouseCursorIcon::EWResize,
|
||||||
(true, _, true, _) | (_, true, _, true) => MouseCursorIcon::NWSEResize,
|
(true, _, true, _) | (_, true, _, true) => MouseCursorIcon::NWSEResize,
|
||||||
|
|
|
||||||
|
|
@ -520,10 +520,12 @@ impl Fsm for SelectToolFsmState {
|
||||||
.find(|layer| !document.network_interface.is_artboard(&layer.to_node(), &[]))
|
.find(|layer| !document.network_interface.is_artboard(&layer.to_node(), &[]))
|
||||||
.map(|layer| document.metadata().transform_to_viewport(layer));
|
.map(|layer| document.metadata().transform_to_viewport(layer));
|
||||||
|
|
||||||
// Check if the matrix is not invertible
|
|
||||||
let mut transform = transform.unwrap_or(DAffine2::IDENTITY);
|
let mut transform = transform.unwrap_or(DAffine2::IDENTITY);
|
||||||
|
let mut transform_tampered = false;
|
||||||
|
// Check if the matrix is not invertible
|
||||||
if transform.matrix2.determinant() == 0. {
|
if transform.matrix2.determinant() == 0. {
|
||||||
transform.matrix2 += DMat2::IDENTITY * 1e-4; // TODO: Is this the cleanest way to handle this?
|
transform.matrix2 += DMat2::IDENTITY * 1e-4; // TODO: Is this the cleanest way to handle this?
|
||||||
|
transform_tampered = true;
|
||||||
}
|
}
|
||||||
|
|
||||||
let bounds = document
|
let bounds = document
|
||||||
|
|
@ -543,6 +545,7 @@ impl Fsm for SelectToolFsmState {
|
||||||
|
|
||||||
bounding_box_manager.bounds = bounds;
|
bounding_box_manager.bounds = bounds;
|
||||||
bounding_box_manager.transform = transform;
|
bounding_box_manager.transform = transform;
|
||||||
|
bounding_box_manager.transform_tampered = transform_tampered;
|
||||||
|
|
||||||
bounding_box_manager.render_overlays(&mut overlay_context);
|
bounding_box_manager.render_overlays(&mut overlay_context);
|
||||||
} else {
|
} else {
|
||||||
|
|
@ -609,7 +612,7 @@ impl Fsm for SelectToolFsmState {
|
||||||
let e0 = tool_data
|
let e0 = tool_data
|
||||||
.bounding_box_manager
|
.bounding_box_manager
|
||||||
.as_ref()
|
.as_ref()
|
||||||
.map(|man| man.transform * Quad::from_box(man.bounds))
|
.map(|bounding_box_manager| bounding_box_manager.transform * Quad::from_box(bounding_box_manager.bounds))
|
||||||
.map_or(DVec2::X, |quad| (quad.top_left() - quad.top_right()).normalize_or(DVec2::X));
|
.map_or(DVec2::X, |quad| (quad.top_left() - quad.top_right()).normalize_or(DVec2::X));
|
||||||
|
|
||||||
let (direction, color) = match axis {
|
let (direction, color) = match axis {
|
||||||
|
|
@ -781,7 +784,10 @@ impl Fsm for SelectToolFsmState {
|
||||||
// If the user clicks on a layer that is in their current selection, go into the dragging mode.
|
// If the user clicks on a layer that is in their current selection, go into the dragging mode.
|
||||||
// If the user clicks on new shape, make that layer their new selection.
|
// If the user clicks on new shape, make that layer their new selection.
|
||||||
// Otherwise enter the box select mode
|
// Otherwise enter the box select mode
|
||||||
let bounds = tool_data.bounding_box_manager.as_ref().map(|man| man.transform * Quad::from_box(man.bounds));
|
let bounds = tool_data
|
||||||
|
.bounding_box_manager
|
||||||
|
.as_ref()
|
||||||
|
.map(|bounding_box_manager| bounding_box_manager.transform * Quad::from_box(bounding_box_manager.bounds));
|
||||||
|
|
||||||
let angle = bounds.map_or(0., |quad| (quad.top_left() - quad.top_right()).to_angle());
|
let angle = bounds.map_or(0., |quad| (quad.top_left() - quad.top_right()).to_angle());
|
||||||
let mouse_position = input.mouse.position;
|
let mouse_position = input.mouse.position;
|
||||||
|
|
@ -790,14 +796,11 @@ impl Fsm for SelectToolFsmState {
|
||||||
|
|
||||||
let show_compass = bounds.is_some_and(|quad| quad.all_sides_at_least_width(COMPASS_ROSE_HOVER_RING_DIAMETER) && quad.contains(mouse_position));
|
let show_compass = bounds.is_some_and(|quad| quad.all_sides_at_least_width(COMPASS_ROSE_HOVER_RING_DIAMETER) && quad.contains(mouse_position));
|
||||||
let can_grab_compass_rose = compass_rose_state.can_grab() && show_compass;
|
let can_grab_compass_rose = compass_rose_state.can_grab() && show_compass;
|
||||||
let is_flat_layer = document
|
let is_flat_layer = tool_data
|
||||||
.network_interface
|
.bounding_box_manager
|
||||||
.selected_nodes(&[])
|
.as_ref()
|
||||||
.unwrap()
|
.map(|bounding_box_manager| bounding_box_manager.transform_tampered)
|
||||||
.selected_visible_and_unlocked_layers(&document.network_interface)
|
.unwrap_or(true);
|
||||||
.find(|layer| !document.network_interface.is_artboard(&layer.to_node(), &[]))
|
|
||||||
.map(|layer| document.metadata().transform_to_viewport(layer))
|
|
||||||
.is_none_or(|transform| transform.matrix2.determinant().abs() <= f64::EPSILON);
|
|
||||||
|
|
||||||
let state =
|
let state =
|
||||||
// Dragging the pivot
|
// Dragging the pivot
|
||||||
|
|
@ -809,6 +812,44 @@ impl Fsm for SelectToolFsmState {
|
||||||
|
|
||||||
SelectToolFsmState::DraggingPivot
|
SelectToolFsmState::DraggingPivot
|
||||||
}
|
}
|
||||||
|
// Dragging one (or two, forming a corner) of the transform cage bounding box edges
|
||||||
|
else if dragging_bounds.is_some() && !is_flat_layer {
|
||||||
|
responses.add(DocumentMessage::StartTransaction);
|
||||||
|
|
||||||
|
tool_data.layers_dragging = selected;
|
||||||
|
|
||||||
|
if let Some(bounds) = &mut tool_data.bounding_box_manager {
|
||||||
|
bounds.original_bound_transform = bounds.transform;
|
||||||
|
|
||||||
|
tool_data.layers_dragging.retain(|layer| {
|
||||||
|
if *layer != LayerNodeIdentifier::ROOT_PARENT {
|
||||||
|
document.network_interface.network(&[]).unwrap().nodes.contains_key(&layer.to_node())
|
||||||
|
} else {
|
||||||
|
log::error!("ROOT_PARENT should not be part of layers_dragging");
|
||||||
|
false
|
||||||
|
}
|
||||||
|
});
|
||||||
|
|
||||||
|
let mut selected = Selected::new(
|
||||||
|
&mut bounds.original_transforms,
|
||||||
|
&mut bounds.center_of_transformation,
|
||||||
|
&tool_data.layers_dragging,
|
||||||
|
responses,
|
||||||
|
&document.network_interface,
|
||||||
|
None,
|
||||||
|
&ToolType::Select,
|
||||||
|
None
|
||||||
|
);
|
||||||
|
bounds.center_of_transformation = selected.mean_average_of_pivots();
|
||||||
|
}
|
||||||
|
tool_data.get_snap_candidates(document, input);
|
||||||
|
|
||||||
|
if input.keyboard.key(skew) {
|
||||||
|
SelectToolFsmState::SkewingBounds
|
||||||
|
} else {
|
||||||
|
SelectToolFsmState::ResizingBounds
|
||||||
|
}
|
||||||
|
}
|
||||||
// Dragging the selected layers around to transform them
|
// Dragging the selected layers around to transform them
|
||||||
else if can_grab_compass_rose || intersection.is_some_and(|intersection| selected.iter().any(|selected_layer| intersection.starts_with(*selected_layer, document.metadata()))) {
|
else if can_grab_compass_rose || intersection.is_some_and(|intersection| selected.iter().any(|selected_layer| intersection.starts_with(*selected_layer, document.metadata()))) {
|
||||||
responses.add(DocumentMessage::StartTransaction);
|
responses.add(DocumentMessage::StartTransaction);
|
||||||
|
|
@ -859,44 +900,6 @@ impl Fsm for SelectToolFsmState {
|
||||||
|
|
||||||
SelectToolFsmState::RotatingBounds
|
SelectToolFsmState::RotatingBounds
|
||||||
}
|
}
|
||||||
// Dragging one (or two, forming a corner) of the transform cage bounding box edges
|
|
||||||
else if dragging_bounds.is_some() && !is_flat_layer {
|
|
||||||
responses.add(DocumentMessage::StartTransaction);
|
|
||||||
|
|
||||||
tool_data.layers_dragging = selected;
|
|
||||||
|
|
||||||
if let Some(bounds) = &mut tool_data.bounding_box_manager {
|
|
||||||
bounds.original_bound_transform = bounds.transform;
|
|
||||||
|
|
||||||
tool_data.layers_dragging.retain(|layer| {
|
|
||||||
if *layer != LayerNodeIdentifier::ROOT_PARENT {
|
|
||||||
document.network_interface.network(&[]).unwrap().nodes.contains_key(&layer.to_node())
|
|
||||||
} else {
|
|
||||||
log::error!("ROOT_PARENT should not be part of layers_dragging");
|
|
||||||
false
|
|
||||||
}
|
|
||||||
});
|
|
||||||
|
|
||||||
let mut selected = Selected::new(
|
|
||||||
&mut bounds.original_transforms,
|
|
||||||
&mut bounds.center_of_transformation,
|
|
||||||
&tool_data.layers_dragging,
|
|
||||||
responses,
|
|
||||||
&document.network_interface,
|
|
||||||
None,
|
|
||||||
&ToolType::Select,
|
|
||||||
None
|
|
||||||
);
|
|
||||||
bounds.center_of_transformation = selected.mean_average_of_pivots();
|
|
||||||
}
|
|
||||||
tool_data.get_snap_candidates(document, input);
|
|
||||||
|
|
||||||
if input.keyboard.key(skew) {
|
|
||||||
SelectToolFsmState::SkewingBounds
|
|
||||||
} else {
|
|
||||||
SelectToolFsmState::ResizingBounds
|
|
||||||
}
|
|
||||||
}
|
|
||||||
// Dragging a selection box
|
// Dragging a selection box
|
||||||
else {
|
else {
|
||||||
tool_data.layers_dragging = selected;
|
tool_data.layers_dragging = selected;
|
||||||
|
|
@ -953,7 +956,7 @@ impl Fsm for SelectToolFsmState {
|
||||||
let e0 = tool_data
|
let e0 = tool_data
|
||||||
.bounding_box_manager
|
.bounding_box_manager
|
||||||
.as_ref()
|
.as_ref()
|
||||||
.map(|man| man.transform * Quad::from_box(man.bounds))
|
.map(|bounding_box_manager| bounding_box_manager.transform * Quad::from_box(bounding_box_manager.bounds))
|
||||||
.map_or(DVec2::X, |quad| (quad.top_left() - quad.top_right()).normalize_or(DVec2::X));
|
.map_or(DVec2::X, |quad| (quad.top_left() - quad.top_right()).normalize_or(DVec2::X));
|
||||||
let mouse_delta = match axis {
|
let mouse_delta = match axis {
|
||||||
Axis::X => mouse_delta.project_onto(e0),
|
Axis::X => mouse_delta.project_onto(e0),
|
||||||
|
|
|
||||||
Loading…
Reference in New Issue